
Conjunt convex


En l'espai euclidià, un objecte és convex si per a tots els parells de punts dins de l'objecte, tots els punts del segment recte que els uneix també estan dins de l'objecte. Per exemple, un cub sòlid és convex, en canvi un conjunt amb un espai buit interior o que té un bony no ho és, per exemple, una forma de mitja lluna, no és convexa.
Equivalentment, un conjunt convex o una regió convexa és un subconjunt que intersecta tota recta en un únic segment lineal (possiblement buit).[1][2] Per exemple, un cub sòlid és un conjunt convex, però tot allò que tingui un forat o una indentació, per exemple, una forma creixent, no és convex.
La fronterea d'un conjunt convex en el pla és sempre una corba convexa. La intersecció de tots els conjunts convexos que contenen un subconjunt donat A en l'espai euclidià rep el nom d'envolupant convexa de A. És el conjunt convex més petit que conté A.
Una funció convexa és una funció convexa definida en un interval amb la propietat que els seus epigrafs (el conjunt de punts en o sobre la gràfica de la funció) és un conjunt convex. La minimització convexa és un subcamp de l'optimització que estudia el problema de minimitzar funcions convexes en conjunts convexos. La branca de les matemàtiques encarregada de l'estudi de les propietats dels conjunts convexos i de les funcions convexes rep el nom d'anàlisi complexa.
Es pot generalitzar la noció de conjunt convex comes mostra més endavant.
Definicions
[modifica]
Sigui S un espai vectorial o un espai afí sobre els nombres reals, o, més generalment, sobre un cert cos ordenat (això inclou espais euclidians, que són espais afins). Un subconjunt C de S és convex si, per tot x i y en C, el segment lineal que connecta x i y és inclòs en C.
Això significa que la combinació afí (1 − t)x + ty pertany a C per tot x,y en C i t en l'interval [0, 1]. Això implica que la convexitat és invariant respecte les tranformacions afines. A més, implica que un conjunt convex en un espai vectorial topològic real o complex és connex per arcs (i per tant també connex).
Un conjunt C és estrictament convex si tot punt en el segment lineal que connecta x i y a part dels punts finals es troba en l'interior topològic de C. Un subconjunt tancat és estrictament convex si i només si cadascun dels seus punts de frontera és un punt extrem.[3]
Un conjunt C és absolutament convex si és convex i equilibrat.
Exemples
[modifica]Els subconjunts convexos de R (el conjunt dels nombres reals) són els intervals i els punts de R. Alguns exemples de subconjunts convexos del pla euclidià són els polígons regulars sòlids, els triangles sòlids, i les interseccions de triangles sòlids. Alguns exemples de subconjunts convexos d'un espai euclidià tridimensional són els políedres arquimedians i els sòlids platònics. Els políedres de Kepler-Poinsot són exemples de conjunts no convexes.
Conjunt no convex
[modifica]Un conjunt que no és convex rep el nom de conjunt no convex. Un polígon que no és un polígon convex de vegades rep el nom de polígon còncau,[4] i algunes fonts utilitzen més generalment el terme conjunt còncau per referir-se a un conjunt no convex,[5] però en general es descarta l'ús d'aquest terme.[6][7]
El complementari d'un conjunt convex, com l'epigraf d'una funció còncava, de vegades rep el nom de conjunt convex revertit, especialment en el context de l'optimització matemàtica.[8]
En geometria euclidiana
[modifica]Sia C un conjunt en un espai vectorial real o complex. Es diu que C és convex si, per a tot el x i y de C i tot t en l'interval [0,1], el punt
- (1 − t) y + t x
pertany a C.[9] En altres paraules, tots els punts en el segment lineal que connecta x i y són de C. Això implica que un conjunt convex en un espai vectorial topològic real o complex és connex.
Es diu que un conjunt C és absolutament convex si és convex i equilibrat.
Els subconjunts convexos de R (el conjunt de nombres reals) són els intervals de R. Alguns exemples de subconjunts convexos de l'espai euclidià de dues dimensions són els polígons regulars i les corbes d'amplada constant. Alguns exemples de subconjunts convexos de l'espai euclidià de tres dimensions són els sòlids arquimedians i els sòlids platònics. Els políedres de Kepler-Poinsot són exemples de conjunts no convexos.
Propietats
[modifica]Si és un conjunt convex, per a qualsevol de , i qualsevol nombres no negatius tals que , es compleix que el vector pertany a . Tot vector d'aquest tipus s'anomena combinació convexa de .





La intersecció de qualsevol col·lecció de conjunts convexos és convexa, així els subconjunts convexos d'un espai vectorial (real o complex) formen un reticle complet. Això també significa per a qualsevol subconjunt A de l'espai vectorial existeix el conjunt convex més petit que el conté (anomenat l'embolcall convex d'A), és a dir que és la intersecció de tots els conjunts convexos que contenen A.
Els conjunts convexos tancats es poden caracteritzar com les interseccions de semiespais tancats (conjunts de punts de l'espai que són o bé damunt o bé a un costat d'un hiperplà). A partir del que s'acaba de dir, és clar que tals interseccions són convexes, i també seran conjunts tancats. Per demostrar el reciproc, és a dir que cada conjunt convex es pot representar com una intersecció d'aquest tipus, es necessita el teorema de l'hiperplà de suport en la forma que per a un conjunt convex tancat C donat i un punt P extern al conjunt, hi ha un semiespai tancat H que conté C i no P. El teorema de l'hiperplà de suport és un cas especial del teorema Hahn-Banach de l'anàlisi funcional.
Propietats
[modifica]Donats r punts u1, ..., ur en un conjunt convex S, i r nombres no negatius λ1, ..., λr tals que λ1 + ... + λr = 1, la combinació convexa
pertany a S. Com que la definició de conjunt convex és el cas r = 2, aquesta propietat caracteritza els conjunts convexos.
Tal combinació afina rep el nom de combinació convexa de u1, ..., ur.
Interseccions i unions
[modifica]La col·lecció de subconjunts convexos d'un espai vectorial, un espai afí, o un espai euclidià té les següents propietats:[10][11]
- El conjunt buit i l'espai complet són convexos.
- La intersecció de qualsevol col·lecció de conjunts convexos és convexa.
- La unió d'una seqüència de conjunts convexos és convexa, si formen una cadena no decreixent amb inclusió. Per aquesta propietat, la restricció de cadenes és important, ja que la unió de dos conjunts convexes no té per què ser convexa.
Conjunts convexes tancats
[modifica]Els conjunts convexes tancats són conjunts convexes que contenen tots els seus punts límits. Es poden caracteritzar com les interseccions de semiespais tancats (conjunts de punts en l'espai que es troben sobre o en un costat d'un hiperplà).
D'això mateix, està clar que tals interseccions són convexes, i són també conjunts tancats. Per demostrar l'invers, és a dir que es pot representar tot conjunt convex tancat com a tal intersecció, es necessita el teorema de l'hiperplà de suport en la forma que un conjunt convex tancat donat C i un punt P fora del conjunt, hi ha un semiplà tancat H que conté C i no P. El teorema de l'hiperplà de suport és un cas particular del teorema de Hahn-Banach d'anàlisi funcional.
Conjunts convexos i rectangles
[modifica]Sigui C un cos convex en el pla (un conjunt convex l'interior del qual no és buit). Es pot inscriure un rectangle r en C tal que una còpia homotècica R de r sigui circumscrita al voltant de C. El ràtio d'homotècia positiu és a tot estirar de 2 i:[12]

Diagrames de Blaschke-Santaló
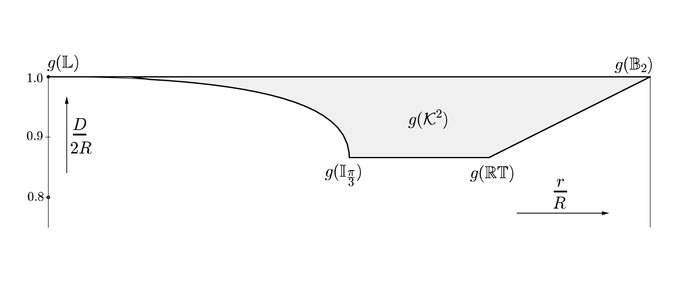
[modifica]Es pot parametritzar el conjunt de tots els cossos convexos planars en termes del cos convex diàmetre D, el seu inradir (el cercle més gran contingut en el cos convex) i el seu circumradi R (el cercle més petit que conté el cos convex). De fet, aquest conjunt pot ser descrit pel conjunt de desigualtat donades per[13][14] i es pot visualitzar com la imatge de la funció g que va del cos convex al punt en donat per (r/R, D/2R). La imatge d'aquesta funció rep el nom de diagrama Blachke-Santaló (r, D, R).[14]










Alternativament, també es pot parametritzar el conjunt a partir de la seva amplada (la distància més petita entre dos hiperplans de suport paral·lels diferents), el perímetre i l'àrea.[13][14]
Altres propietats
[modifica]Sigui X un espai vectorial topològic i convex.

- i són ambdós convexos (és a dir, la clausura i l'interior de dos conjunts convexos són convexos).
- Si i llavors (on ).
- Si llavors:
- , i
- , on és l'interior algebraic de C.










Conjunts convexos estelats
[modifica]
Sia C un conjunt en un espai vectorial real o complex. C és un estel convex si existeix un x0 de C tal que el segment de recta des de x0 fins a qualsevol y de C està contingut a C. Per tant un conjunt convex no buit és sempre convex estelat però un conjunt convex estelat no sempre és convex.
Generalitzacions i extensions de la convexitat
[modifica]La idea de convexitat en l'espai euclidià es pot generalitzar modificant la definició en uns o altres aspectes. Es fa servir el nom de "convexitat generalitzada", perquè els objectes que resulten retenen certes propietats dels conjunts convexos.
Convexitat ortogonal
[modifica]Un exemple de convexitat generalitzada és la convexitat ortogonal.[15]
Un conjunt S en l'espai euclidià s'anomena ortogonalment convex, si qualsevol segment paral·lel a qualsevol dels eixos de coordenades que connecti dos punts de S roman totalment dins de S. És fàcil de demostrar que la intersecció de qualsevol col·lecció de conjunts ortogonalment convexos és ortogonalment convexa. Algunes altres propietats dels conjunts convexos també es compleixen.
Geometria no euclidiana
[modifica]La definició d'un conjunt convex i d'un embolcall convex s'estén de manera natural a la geometria no euclidiana definint un conjunt convex geodèsic com el que conté tots els punts dels segments de geodèsiques que uneixen qualsevol parella de punts del conjunt.
Topologia d'ordre
[modifica]La convexitat es pot estendre per a un espai X dotat de la topologia d'ordre, fent servir l'ordre total de 'espai.[16]

Sia . El subespai és un conjunt convex si per a tots els parells de punts tals que , l'interval està contingut en . És a dir, és convex si i només si .






Convexitat abstracta (axiomàtica)
[modifica]La idea de convexitat es pot generalitzar a uns altres objectes, si certes propietats de convexitat se seleccionen com axiomes.
Donat un conjunt X, una convexitat sobre X és una col·lecció \mathcal{C} de subconjunts de X que satisfan els següents axiomes:[17]
- El conjunt buit i X són a
- La intersecció de qualsevol col·lecció de conjunts de és de .
- La unió d'una cadena (respecte de la relació d'inclusió) d'elements de és de .

Els elements de s'anomenen conjunts convexos i la parella (X, ) s'anomena un espai de convexitat. Per a la convexitat ordinària, els primers dos axiomes es compleixen, i el terç un és trivial.
Per a una definició alternativa de convexitat abstracta, més adequada a la geometria discreta, veure les geometries convexes associades amb animatroides.
Referències
[modifica]- ↑ Morris, Carla C.; Stark, Robert M. Finite Mathematics: Models and Applications (en anglès). John Wiley & Sons, 24 August 2015, p. 121. ISBN 9781119015383.
- ↑ Kjeldsen, Tinne Hoff «History of Convexity and Mathematical Programming». Proceedings of the International Congress of Mathematicians, ICM 2010, pàg. 3233–3257. DOI: 10.1142/9789814324359_0187. Arxivat 2017-08-11 a Wayback Machine.
- ↑ Plantilla:Halmos A Hilbert Space Problem Book 1982
- ↑ McConnell, Jeffrey J. Computer Graphics: Theory Into Practice, 2006, p. 130. ISBN 0-7637-2250-2..
- ↑ Weisstein, Eric W., «Concave» a MathWorld (en anglès).
- ↑ Takayama, Akira. Analytical Methods in Economics. University of Michigan Press, 1994, p. 54. ISBN 9780472081356. «An often seen confusion is a "concave set". Concave and convex functions designate certain classes of functions, not of sets, whereas a convex set designates a certain class of sets, and not a class of functions. A "concave set" confuses sets with functions.»
- ↑ Corbae, Dean; Stinchcombe, Maxwell B.; Zeman, Juraj. An Introduction to Mathematical Analysis for Economic Theory and Econometrics. Princeton University Press, 2009, p. 347. ISBN 9781400833085. «There is no such thing as a concave set.»
- ↑ Meyer, Robert «The validity of a family of optimization methods». SIAM Journal on Control and Optimization, vol. 8, 1970, pàg. 41–54. DOI: 10.1137/0308003..
- ↑ Sergio Amat, Francesc Aràndiga, José Vicente Arnau, Rosa M. Donat Beneito, Pep Mulet Mestre, Rosa Peris Sancho. Aproximació numèrica. Universitat de València, 2002, p. 21. ISBN 843705513X.
- ↑ Soltan, Valeriu, Introduction to the Axiomatic Theory of Convexity, Ştiinţa, Chişinău, 1984 (in Russian).
- ↑ Singer, Ivan. Abstract convex analysis. New York: John Wiley & Sons, Inc., 1997, p. xxii+491 (Canadian Mathematical Society series of monographs and advanced texts). ISBN 0-471-16015-6.
- ↑ Lassak, M. «Approximation of convex bodies by rectangles». Geometriae Dedicata, vol. 47, 1993, pàg. 111–117. DOI: 10.1007/BF01263495.
- ↑ 13,0 13,1 Santaló, L. «Sobre los sistemas completos de desigualdades entre tres elementos de una figura convexa planas». Mathematicae Notae, vol. 17, 1961, pàg. 82–104.
- ↑ 14,0 14,1 14,2 Brandenberg, René; González Merino, Bernardo «A complete 3-dimensional Blaschke-Santaló diagram» (en anglès). Mathematical Inequalities & Applications, 2, 2017, pàg. 301–348. arXiv: 1404.6808. DOI: 10.7153/mia-20-22. ISSN: 1331-4343.
- ↑ Rawlins, Gregory J.E.; Wood, Derick. Ortho-Convexity and its Generalizations (en anglès). 6. Elsevier, 1988, p. 137–152. DOI 10.1016/b978-0-444-70467-2.50015-1. ISBN 978-0-444-70467-2.
- ↑ Munkres, James. Topology (en anglès). 2a ed.. Prentice Hall, 1999. ISBN 0-13-181629-2.
- ↑ Soltan, Valeriu. Introduction to the Axiomatic Theory of Convexity (en rus). Chişinău: Ştiinţa, 1984.